CV値の考察(4)動力性能・走行性能(2)ステップ数と実際の速度(1)
動力性能・走行性能関係のCV値を調べているうちに、車両の走行速度を実際に計測してみる必要性に迫られました。同一メーカの同一シリーズの車両に同一メーカの同一Decoderを搭載しDefault値で運転しても明らかに動作が異なることです。
実際に天賞堂プラスチック製C58シリーズの東北タイプ 平底テンダー(品番51030)(以下C58 19[)と東北タイプ 船底テンダー(品番51031)(以下C58 402)にDigitraxのDecoder DZ125(現行品はDZ126になっています)を搭載しDefault値で走行させても、走行性能に差が出ます。天賞堂ダイキャスト製D51シリーズ(第1世代)のD51 半流線型東北(品番71002)を2両所有していますが、やはり走行性能に差があります。
しかし、現状では感覚的な差または定速走行させたときの走行時間差などで表現するしかありません。そんな中でIMONの鉄道模型速度計測装置(Speedmater)を購入することとしました。少々価格が高いとは思いましたが、ポイントを持っていたのでIMON池袋店で購入しました。(¥27,000)

走行試験用レイアウト
現在のレイアウトは、多くのポイントや2%、3%の勾配があるため、平坦な試験用レイアウトを設定しました。手持ちのR730、S246F×2、S369×4を利用して周回線路を作りました。今後の各種試験にもこのレイアウトを利用します。S246Fを2本使ったのは、CV値の設定を試験用レイアウトに車両を乗せたまま行うためです。全長6,554.73mmになります。
写真の左にあるのは、Command Station;DCS240、Throttle;DT602、DesktopStationのDSswitch(Step(%)確認用)そして線路を跨がっているのが今回購入したIMONの鉄道模型速度計測装置です。
早速測定してみました。
同一メーカの同一機種であれば殆ど走行性能は変わらないと考え、これも手持ちの天賞堂のプラスチック製C58のNo.51030、東北タイプ 平底テンダー(C58 19)と、No.51031、船底テンダー(C58 402)の2両を使います。これらの商品は既に完売になっていますが、DCC用に8Pコネクタが設置されておりDCCファンにとって使いやすい車両です。DecoderはDigitraxのDZ125(既に廃版になっており現行はDZ126)を使いました。
なお、DZ125のCV値はDefault値、CV#29=6,CV#2,CV#5,CV#6は0です。
車両による個体差は当然あると考えていました。下図の通り、最高速度でC58 402がC58 19より約10km/h速いことがわかります。また、Step(%)が約70で最高速度に達しその後はStepを増やしても実際の速度はほぼ一定になっていることがわかります。本来はモーターにかかっている直流電圧を直接測定できれば良いのですが、PWM(Pulse Width Modulation パルス幅変調)方式を使っているため簡単に測定することができません。このケースでは、モーター自身の電圧対速度特性が影響しているようにも思えます。

しかし、CV値がDefault値の場合、基本的にはStep 0% から100%まで直線的になるはずです。70%付近からほぼフラットになるのは不思議です。
次回以降、その後の試験結果を記載します。
CV値の考察(3)動力性能・走行性能(1) CV#29 Bit 4 ”Speed Table”、CV#2、CV#5、CV#6、CV#25、CV#66~CV#95
多くのマニュアルでは、CV値についてCV#1から順番に説明しています。しかし、ユーザーから見るとどの機能を使うか、どの機能を変更するか、が重要でそのためにどのCVを変更する必要があるか、を知りたいはずです。そこで、このブログでは機能別に調べた結果を記載します。機能別に説明してある例を記します
Lenzは、5. Features of the decoder で最初に記載しているのは、5.1 Capacity and protection equipmentです。DCCの老舗としての考えだと思いますが、ショートや過負荷が発生した際その原因をCV#30(Error Information)に自動的に書き込む、というものです。他のマニュアルでCV#30の説明、ましてCV説明の最初に記載してあるのは見たことがありません。その後は5.2 Motor control 5.3 Running notches という具合に機能別にどのCVをどのように設定すればよいか、が記載されています。もちろん、7 Table of supported CVs でCVの一覧が表示されています。なお、Lenzでは “Default” ではなく “Ex-works setting” が使われています。” Ex-works setting” は「工場出荷時設定値」とでも訳すのでしょうから、“Default” と同義だと思います。
Digitraxは5.0 Decoder ProgrammingでCVの読み取り、書き込み方法を解説した後、6.0 CVs-Configuration Variables でCV#1、CV#29等の基本的な機能を説明し、Table III: CVs used in Digitrax Decoders、一覧が表示されています。
また、”Visit our online CV Calculator at www.digitrax.com/support/cv/ for help with determining the best CV Value to program into a CV” とヘルプサイトを記しています。その後、8.0 LocoMotion CVs で動力性能・走行性能関係のCVについて解説し、9.0 Function CVs で灯火関係、特にDigitrax特有のFX3
(正確には3はXの右上)の解説が詳しくされています。10.0 Decoder Utility CVs、11.0 Digitrax SoundFX Systemの説明があります。
LokSound5は私が見た限りでは最も詳細にDCC全体について記載されています。Lenz、LokSound5のメーカであるESUはともにドイツの会社です。説明の内容は詳細にわたっており、初心者向けには少々理解が困難な内容もあります。LokSound5では 8. Decoder Settings (Programming) でCVについて説明があり、欧州各社のDCCシステムでProgrammingをどのように行うか、システム毎に記載されています。次に 9. Address settings でアドレスの設定について記載されています。そして 10. Adapting the Driving Characteristics、 11. Motor Control、12. Function outputs、13. Adjusting the Sound Effects、14. Random functions、15. Decoder Reset、16. Special Functions と続きます。8.から16.までで46ページも費やしています。最後に 21. LokSound CV table でCV#1からCV#255までList of all supported CVs としてCVの一覧表が掲載されています。
話がそれました。
DCCの機能としては、まず車両が動くことだとおもいますので、動力性能・走行性能から入ります。
DCCによる運転では、おそらくアナログDCを運転していた人がDCC化して運転するのが殆どと考えられます。したがって、アナログDCと同様の感覚で運転できる様にDefault値が設定されているように思えます。
前回CV#29 Bit 1 で説明したSpeed Step は各社Command StationがDefaultで128Stepになっているようですので実質的に全て128StepがDefaultになっていると考えています。以下断らない限り128Stepを前提に記載します。
電気機関車や電車の実機はノッチとブレーキで速度を調整しています。一方、模型では基本的にブレーキに相当するものはありません。またノッチに代わるものとして無段階で速度を調整できるコントローラが使われています。ブレーキが無い理由は、物理的なブレーキを模型で実現することが困難なことと、車両重量に比しモーターのトルクが大きいため、減速もスロットルを調整すればすぐにスロットル位置に対応する速度になるためです。ステップはノッチに相当するもので、デジタルですから基本は非連続ですからノッチの考え方と類似した設定が可能です。14Stepは実機に近いステップ数ではないかと思っています。一方128StepはアナログDCのコントローラの無段階に近い扱いになります。そのため128StepがDefaultになっているのではないかと思っています。なお、実機でも蒸気機関車や液体変速式のディーゼル車両は車のアクセル同様連続的なスピードコントロールになっています。
ここから本題のスピードテーブルの話に入ります。
まず前回説明したCV#29のBit 4の取り扱いです。
前述したように、各社のDefault値は “0” になっています。QSI以外は、NMRAの規定通り "0" = speed table set by configuration variables #2,#5, and #6 と書かれているとおり、CV#2、CV#5及びCV#6規定される ”Speed Table” を使用しています。
簡単に言うとCV#2(Vstart)はスタート電圧(Digitrax日本語版)等と記載されていますが、車両に印加される最低電圧、CV#5(Vhigh) は(Digitrax日本語版)等と記載され車両に印加される最大電圧、CV#6(Vmid)は中間点電圧(Digitrax日本語版)等と記載され、128ステップの中間点64ステップで車両に印加される電圧を規定しています。Default値はCV#2=”0” 、CV#5=”0” 又はCV#5=”225” 、CV#6=”0” としている例が殆どです。CV#5、CV#6の”0” は少し特殊な意味を持っています。CV#5、CV#6について、NMRAでは”0”又は”1”は特別な意味を持ち”Vhigh (Vmid) is not used in the calculation of the speed table”と書かれています。この意味は、Speed Tableにおいて、Step0からStep128まで青線で示しているように直線で表される、即ち通常のアナログDCのスロットルと同様の動きをします。
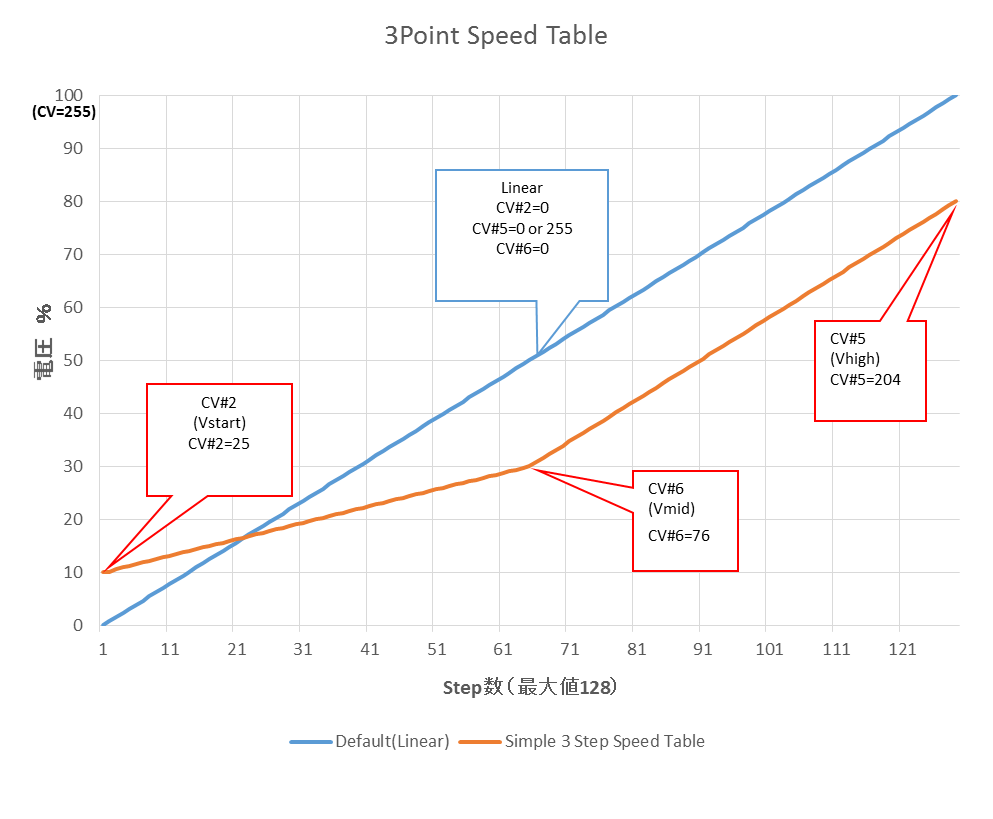
一方、CV#2,CV#5、CV#6 を設定することにより赤線のようなスピードテーブルも作れます。図の例では CV#2=25、CV#5=204、CV#6=76 に設定した場合のスピードテーブルを示しています。何故このようなスピードテーブルが必要になるのでしょうか?最高速度が異なる車両を運転する場合、例えば最高運転速度100Km/hのC62と最高運転速度65Km/hの9600を同時に運転する場合、Decoderの設定が共にLinear(青線)としていれば、両車両とも同じように動き最高速度も同じになります。明らかに実機と異なる速度になります。このような場合9600のCV#5 を設定することにより最高速度で走行しても速度が異なるようになります。C62と9600の最高速度差を実現するためには65/100×255=165.75 CV値は原則整数ですので、即ち9600のCV#5=166に設定すれば良いことになります。国鉄時代、JR時代を通して、狭軌の最高運転速度は130Km/hですから、各車両の最高運転速度に合わせたCV#5 を設定すれば、実機に比例した最高速度が実現出来ます。
前述したようにQSI社はCV#29 Bit 4 ”Speed Table” を “0” (Default値)に設定した場合NMRA標準とは異なる表現になっています。
3.17 CV 29 Configuration Data (P67)
Bit 4 = Speed Table set by configuration variables.
“0” Speed Table not used.
“1” Speed Table set by CV 25, Quantum Speed Table selection.
When bit 4 of CV 29 is set to “0” a linear Speed Table is used by default.
しかし、CV#2,CV#5、CV#6の説明を読むと、他社同様 Bit 4=”0”の場合CV#2,CV#5、CV#6 の設定によるようです。
各社のCV#2、CV#5、CV#6のDefault(初期値)は次の通りです。
|
各社のDefault(初期値) |
||||||
|
CV# |
Name |
Lenz |
Digitrax |
ESU |
QSI |
Soundtraxx |
|
2 |
Vstart |
1 |
0 |
3 |
32 |
7 |
|
5 |
Vhigh |
254 |
0 |
255 |
1 |
ー |
|
6 |
Vmid |
48 |
0 |
ー |
0 |
ー |
注:”-”はManualに記載がありません
この表から読み取れる各社のDefaultの考えは次の通りと考察されます。
Lenz社はCV#6(Vmid)の値が48とCV#5(Vhigh)の20%弱に設定されています。スロットルを半分まで回す間はスロットルに対する反応が小さく、半分以降はスロットルに対する反応が大きくなっています。Speed Tableの赤線部分の傾きが前半はより緩やかで、後半はより急峻になります。Lenz社が何故このようなDefaultにしているか理由はわかりかねます。
QSI社はCV#2(Vstart)が32と他社に比較し大きな数字になっていますが、実感としては他社とほぼ同様です。なお、QSI社はWhen bit 4 of CV 29 is set to “0” a linear Speed Table is used by default. と記載しておりLinearであるとしています。
Digitrax社は6.13.1 Simple 3 Step Speed Tables with V-max, V-mid & V-start で機関車の種類に応じた標準的な数値が示されています。
入換機関車(Switcher)は「低速のスピードコントロール中心で制限された最高速度」と記載され設定例としてCV#2=26, CV#6=38, CV#5=64 が示されています。本線機関車(Mainline Loco)は「常用速度まで早い増加、その後最高速度まで緩やかな増加」と記載され設定例として CV#2=26, CV#6=128, CV#5=154 が示されています。その中間として CV#2=26, CV#6=48, CV#5=98 が示されています。
ESU社、Soundtraxx社はほぼアナログDCと同様の反応になり、アナログDCから移行する方には違和感が無いようにしていると思われます。
CV#29、Bitb4=”1” に設定した場合、NMRAの規定では、"1" = Speed Table set by configuration variables #66-#95 と規定されています。
つまり、CV#66に最低電圧(例えば0や1)がCV#95に最高電圧(例えば225)を規定し、その間のCV#には少ない方から順番に電圧値を入れます。通常はそこまで細かにステップを規定する必要性はないと考えられCV#29、Bitb4=”0” で最低電圧、中間電圧、最高電圧を規定すれば十分と考えられるため、DefaultでCV#29、Bitb4=”0” になっていると考察できます。
CV#66~CV#95 はDefaultで全て規定していないか、何らかの数値を設定しているものもあります。
なおDigitrax社は6.13.2 High Resolution 28 Step Speed Tables CV65-95 との項目があり、元々28ステップモードを前提にしたスピードテーブルと読めます。
また、QSI社だけは、“1” Speed Table set by CV 25, Quantum Speed Table selection. と規定しており、3.16 CV 25 Quantum Speed Table Selection でLinearを含む11種類の曲線が規定されており、その中から選ぶ方法がとられています。NMRAでもCV#25は”Speed Table/Mid Range Cab Speed Step” と規定されていますが、QSI社以外は、CV#25についての記載はありません。
いずれにせよ、通常はCV#29、Bitb4=”0” で十分だと考えられます。
CV値の考察(2):CV#1(Primary Address)、CV#29(Configuration Data #1)
CV値の考察(1)でアドレスの話をしました。CV1はNMRAの規定で必須4項目の一つで、全てのDecoderに必須のCVになっています。全てのDecoderはDefault(初期値)でCV#1(Primary Address)を使用するように設定されており、CV1のDefaultは"3"に設定されていることを記載しました。CV#1の範囲は1~127ですから、127車両を個別に制御することができます。CV#1="0"は特別で、通常のDC機をDCC化された線路上で動かすために使用されます。
*Primary Addressは会社によってLoco address、Short address、2桁アドレス等と記載されています。
個人のレイアウトであれば127車両で十分ですが、クラブレイアウト等で128以上の車両を個別に制御するためにはExtended Addressを使う必要があります。CV#17及びCV#18でExtended Addressを設定しますが、実はCV#17,CV#18を設定しただけではExtended Addressを使うことができません。この辺がCV値のわかりにくい要因の一つになっていると思います。Primary Addressを使うかExtended Addressを使うかを別のCVで規定しています。CV#29(Configuration Data #1)にその情報が記録されています。NMRAの規定でCV#29は必須4項目の一つで、全てのDecoderに必須のCVになっています。CV#29は重要な項目を複数設定できるようになっています。前回既にCV#29の各bitについて一応説明しましたが、改めて各社のmanualの記載を含め説明します。
まず基本となるNMRAの記載を以下に示します。
Configuration Variable 29 Configurations Supported
Bit 0 = Locomotive Direction: "0" = normal, "1" = reversed. This bit controls the locomotive's forward and backward direction in digital mode only. Directional sensitive functions, such as headlights (FL and FR), will also be reversed so that they line up with the locomotive’s new forward direction. See S9.1.1 for more information.
Bit 1 = FL location: "0" = bit 4 in Speed and Direction instructions control FL, "1" = bit 4 in function group one instruction controls FL. See S-9.2.1 for more information.
Bit 2 = Power Source Conversion: "0" = NMRA Digital Only, "1" = Power Source Conversion Enabled, See CV#12 for more information,
Bit 3 = Bi-Directional Communications: "0" = Bi-Directional Communications disabled, "1" = Bi-Directional Communications enabled. See S-9.3.2 for more information.
Bit 4 = Speed Table: "0" = speed table set by configuration variables #2,#5, and #6, "1" = Speed Table set by configuration variables #66-#95
Bit 5 = "0" = one byte addressing, "1" = two byte addressing (also known as extended addressing), See S 9.2.1 for more information.
Bit 6 = Reserved for future use.
Bit 7 = Accessory Decoder: "0" = Multifunction Decoder, "1" = Accessory Decoder (see CV #541 for a description of assignments for bits 0-6)
*Note If the decoder does not support a feature contained in this table, it shall not allow the corresponding bit to be set improperly (i.e. the bit should always contain its default value).
Bit 6、Bit 7は各社共通の表現になっています。ここではMultifunction Decoder(Motorを取り扱うDecoder)のみ取り扱いますので、Bit 6、Bit 7はともに"0"になります。
Bit 0は比較的単純です。Locomotive Direction即ち車両の進行方向になります。DCCのControllerでForward(前進)を選んだときに進む方向を選択できます。(Normal Directin of Travel : NDOTと略されることもあります。)通常はBit 0="0"ですが、Mortorの配線を間違った場合や、重連運転する際に1両の進行方向を変えたいときにBit 0="1"を選択します。ここで気をつけなければならないのは、進行方向に関係するFL(f)やFL(r)等も自動的に変更されます。
Bit 1は少々やっかいです。NMRAの書き方は "FL location"のタイトルになっています。しかしDigitrax(英語版・日本語版)、LokSound5、QSIのManualでは、Speed step control、Speed step and FL location等と記載され、”0”は14ステップモード、"1"は28/128ステップモード等と記載されているのが殆どです。ただし、DCCマニュアルだけは "FL function" "ライトファンクションの設定" (P36)と記載されています。DCCマニュアル、LokSound5 のP44、 7.2.1.1. DCC Speed Steps („flashing lights“)、QSI のP63、3.17 CV 29 Configuration Data Bit 1 = Speed Steps and FL Locationにその理由が記載されています。
現在のDecoderは私の知る限り128スッテップモードをサポートし、かつDefaultは128
スッテップモードが殆どだと思います。しかし、当初のDecoderは14ステップモードが標準だったようで、Digitrax (英語版)P36、7.2.1 Characteristics Controlled by CV29には
"3. Speed step control: Advanced Mode (28/128 speed steps) or Standard
Mode (14 speed steps)"の記載があり、当初は14ステップモードが標準であったことが読み取れます。NMRAのs9.2.1の Speed and Direction Instructions 及び Function Group One Instruction (100) に14ステップモードの標準では、28/128ステップモードの標準と異なるFunction FLの制御を行っていることが記載されており、その結果前照灯の点滅等の不具合が生じるとのことです。
しかし、LokSound5ではDecoder側でCommand Station側の状況を自動判別(Auto-detection of DCC Speed Steps)するのでBit 1を気にしなくて良い、と記載され、Bit 1のDefaultは ”0” になっています。
他の会社はBit 1のDefaultは ”1” となっているようです。
なお、Auto-detection of DCC Speed Stepsは、次の各社のシステムと確認が取れていると書かれてます。
• ESU ECoS®
• Bachmann E-Z-Command® Dynamis®
• ROCO® Lokmaus2 and Lokmaus3
• Uhlenbrock® Intellibox
• Lenz® Digital plus V2.3
• ZIMO® MX1
• Märklin® Central Station
どうもDigitrax等の米国メーカとは確認してないようです。
Bit 2 は各社共通で "Power Source Conversion" とは通常のDC運転に自動切り替えするか否か、即ちDCCの車両を通常のDC運転で動かせるか否かです。各社ともDefaultは "1"になっています。Digitrax(英語版)P37 Brake Generator Example:、日本語版 P30 自動停止装置(ATS)では、あえて自動切り替えしない使い方が記載されていますが、興味のある方はお読みください。
Bit 3 は注意が必要です。"Bi-Directional Communications" とは「双方向通信」です。通常はCommand StationからDecoderに信号を送り、Decoderはその信号を解読して必要な動作を行う「片方向」通信です。これに対しNMRAでは双方向通信の規定があり、詳細はs-9.3.2に記載されています。RailComⓇの規格はNMRAに認められた双方向通信規格ですが、Digitraxの "Transponding" は双方向通信に該当しますが、NMRA標準として認められていないためBit 3でコントロールすることはできません。Digitraxは独自にCV#61 でコントロールしていますので注意してください。
このため、Bit 3の取り扱いは各社によって異なっています。
LokSound5では "0" Disable RailComⓇ、 "1" Enable RailComⓇ、としておりDefaultは "1" Enable RailComⓇとなっています。
QSI では "Bit 3 = Advanced Decoder Acknowledgement (not used)" と明確に不使用となっています。
Digitraxは Bit 3に関する記載は一切ありませんが、CV#29の数値で"24"から"31"の記載が無いことから "0" に設定されているのがわかります。
聞いた話ですが、DigitraxのTransponding機能をNMRAの他社メンバーに話をせずに実装したため、"Bi-Directional Communications" の標準化の際DigitraxのTransponding機能が認められなかった、という話です。標準化の一端が見えるようです。
Bit 4 は少々やっかいです。NMRAは "0" = speed table set by configuration variables #2,#5, and #6, "1" = Speed Table set by configuration variables #66-#95 と規定していますが、QSIだけは
Bit 4 = Speed Table set by configuration variables.
“0” Speed Table not used.
“1” Speed Table set by CV 25, Quantum Speed Table selection.
When bit 4 of CV 29 is set to “0” a linear Speed Table is used by default.
即ち、QSIだけは、 "1" で独自のQuantum Speed Table を規定しているCV#25 から選択する形になっています。ただ、QSIも他社同様Defaultは"0"としています。各社がDefaultを "0" にしているのは、DC運転と近い動作をするa linear Speed Tableを使用するためと考えられます。
Speed Tableは少々複雑ですので、次回以降「動力性能」として詳細を記載します。
Bit 5 は各社共通です。"0" = one byte addressing, "1" = two byte addressing (also known as extended addressing)ですから、"0" はCV#1で設定されているPrimary Addressが適用されます。"1" はCV#17、CV#18で設定されるExtended Addressが適用されます。
NMRAのTable 1で "Primary Address" "Extended Address" と書かれているにもかかわらず、あえて " one byte addressing" "two byte addressing"を使う意味がわかりません。
各社とも Bit 5 のDefaultは "0" です。
CV#29のDefaultは、LokSound5を除き、"6"に設定されています。即ち、
Bit 0 = Locomotive Direction: "0" 前進
Bit 1 = FL location: "1" 28/128 スピードステップ
Bit 2 = Power Source Conversion: "1" DC運転可能
Bit 4 = Speed Table: "0" 双方向通信不可
Bit 5 = "0" = one byte addressing Primary Address使用
となっています。
一方LokSound5は "12" 同じESUですが少し古いLokSound2 は "4" となっています。
LokSound5
Bit 0 = Locomotive Direction: "0" 前進
Bit 1 = FL location: "0" 14スピードステップ
Bit 2 = Power Source Conversion: "1" DC運転可能
Bit 4 = Speed Table: "1" 双方向通信(RailComⓇ)可
Bit 5 = "0" = one byte addressing Primary Address使用
LokSound2
Bit 0 = Locomotive Direction: "0" 前進
Bit 1 = FL location: "0" 14スピードステップ
Bit 2 = Power Source Conversion: "1" DC運転可能
Bit 4 = Speed Table: "0" 双方向通信不可
Bit 5 = "0" = one byte addressing Primary Address使用
CV値の考察(1)概説
一昨年までDecoderはDigitraxと天賞堂のQSIが中心で一部Lenzを使ってきましたが、最近はLokSound5やNGDCCも使い始めました。そんな中で、各社のDecoderのCV値が会社、機種によってかなり異なっていることに気づきました。そこでCVについて調べたことを掲載します。ご参考になれば幸いです。
CVの話をするためにはDCCについて簡単に説明します。
鉄道模型は英国が発祥と言われており、その後ドイツのメルクリン等ヨーロッパを中心に発展してきました。モーターで動かす電動鉄道模型は、3線式のアナログAC方式が最初でした。
50年以上前に私が初めて手にした鉄道模型は3線式のOゲージでACでした。電子機器や半導体の発展で今はDCが当たり前になっていますが、昔はDCで電圧可変を行うことは簡単ではありませんでした。その点ACは巻き線式の変圧器で二次側巻き線からタップを取り出すことにより電圧可変(連続では無く、例えば2V単位で)することが容易でした。私が最初に買ったものもこのタイプでした。海外では今でもAC機があると聞いていますが見たことはありません。
その後、アナログDC機が発売され、今ではアナログDCが鉄道模型の主流になっています。普通のアナログDC機は線路から電源を取りそのままモーターに供給しています。つまり、アナログDCのパワーパック・コントローラ等はDC電圧0V~最大電圧12V(HO)までスロットルの位置に応じた電圧を線路に供給し、それによって車両のモーターが回転し車両が動くことになります。基本的にスロットルと電圧は直線的(linear)に対応しています。
アナログDCでは、基本的に同一線路に搭載された車両は、全て同時に動きます。アナログDCの大きなレイアウトでは、給電区間を複数もうけるなどで、複数の車両を別々に動かすこともできましたが、基本は同一給電区間では一車両しか運転できません。このため鉄道模型各社は独自のデジタル方式を開発しましたが、互換性がなくなかなか普及しませんでした。
その様な状況下でNMRA(全米鉄道模型協会)がデジタル方式の標準化を進めDCC(Digital Command Control)規格を制定しました。欧州の鉄道模型標準規格(NEM規格)を制定していたMOROPもNMRAに協力し、DCCが事実上のデジタル鉄道模型の世界標準になりました。DCC規格以外ではメルクリン社のメルクリンデジタルが独自規格であります。
DCCに関する書籍は非常に少なく、これが我が国でDCCが普及しない原因の一つではないかと思います。私が持っている書籍は
DCC マニュアル2009 根津 達也著 機芸出版社
本ブログでこの文書から引用する場合 "DCCマニュアル" と記載します。
だけです。英文では、Digitrax社が出している BIg Book of DCC が有名ですが、私は残念ながら持っていません。
Digitraxの日本語版マニュアルはホビーセンターカトーが発行していましたが、ホビーセンターカトーの新しいHPではDCCを見つけることができません。旧HPでは各種マニュアルとして、用語集を含め7種類が販売されていました。デコーダ関係では
29-170 デジトラックス・デコーダマニュアル基礎編 (2005年7月改訂)
29-105 デジトラックス・デコーダマニュアル応用編 (2004年5月改訂)
の2冊を所有しています。
本ブログでこの文書から引用する場合 "Digitrax(日本語版)" と記載します。
また、永末システム事務所のNGDCC製品については欧米のDCCメーカ並みに製品別の日本語マニュアルが手に入ります。
欧米メーカのマニュアルは、各社のHPからD/L可能です。機種別のマニュアルを提供している会社については、代表的な機種のマニュアルを掲載しています。
今回参考にしたManual類は
- NMRA
NMRA Standards s-9.2.2 Configuration Variables For Digital Command Control, All Scales July 2012 (12ページ)
本ブログでこの文書から引用する場合 "NMRA"と記載します。
- Lenz社
Information STANDARD+ V2 (Art.Nr. 10231-02)
5. Auflage / 5th Edition / 5. Edition 11/20 (68ページ)
本文はドイツ語、英語、フランス語で記載されています。このInformationに詳細は "Manual Plus Decoders"と出ているのですが、HPで見つけることができません。
本ブログでこの文書から引用する場合 "Lenz" と記載します。
- Digitrax社
Digitrax Mobile & Sound Decoder Manual Second Edition (86ページ)
Mobile Decoder Manual (70ページ)
本ブログでこの文書から引用する場合 "Digitrax(英語版)" と記載します。
- ESU社
LokSound5 Instraction Manual 6. Edition June 2019 (112ページ)
A4横書きで左右に記載されており、実質的にほぼ倍のページ数に相当します。
本ブログでこの文書から引用する場合 "LokSound5" と記載します。
- QSI社
NMRA DCC Reference Manual For QSI QuantumⓇ 3、2 and 1 Equipped
Locomotives
Version 5.2.0 for Firmware Versions 7, 8 and 9 5-August-2015 (468ページ)
本ブログでこの文書から引用する場合 "QSI" と記載します。
- Soundtraxx社
Tsunami2™ Digital Sound Decoder Steam Technical Reference (133ページ)
CVだけが説明されています。
本ブログでこの文書から引用する場合 "Soundtraxx" と記載します。
とても全てを読むことはできませんので、必要に応じて参考にしました。
Soundを搭載したDecoderを販売している、LokSound5、QSI、SoundtraxxのManualのページ数が非常に多いのは、Sound系のCV値について詳細に説明してあるためです。
また、 Sound を搭載すると、動力性能・走行性能に関わるCV値を変更する必要が増えるのも実態です。例えば、蒸気機関車のブラスト音を動輪の回転に同期させたい、電気機関車などの力行音と惰行音を使い分けるため速度により使い分けたい、等々でCV値を変更する必要が生じるため、CV値の説明が増える傾向にあります。
英文の理解間違いや記載があるにもかかわらず探し当てられなかった項目もあると思います。その点をご理解いただきお読みいただくようお願いします。間違い等について、ご指摘いただければ幸いです。
CVの日本語訳はDigitraxのマニュアルで「コンフィギュレーション変数」と記載されていますが、Configuration Variablesを訳せば構成変数、環境変数、配列変数等と訳すのだろうと思います。
DCCを使っている方は、少なくとも一つのCVは変更していると思います。それはCV#1です。(CV番号を明確にするためCV#番号と#を入れます)
DCCで初めて車両を動かす際、CV #1(Primary Address 以後( )内の英語名称は原則としてNMRAの名称です)のDefault Valule(初期値)は3に設定されています。従って車両アドレスを3に設定してコントローラを動かせば車両は動き始めます。しかし、他の車両も車両アドレスが3に設定されていれば他の車両も動き始めます。このため、CV#1を3以外の番号(1~127)に設定変更する必要があります。
DCCではExtended Addressも使うことができます。Extended Addressを4桁アドレス(Digitrax日本語),LongAddress(LokSound 5)と記載されている例もあります。Extended Addressを使うと128-9999(デジトラックスでは9983までになっています)のアドレスを使うことができます。個人でDCCを使う場合はPrimary Address で十分だと思いますが、クラブレイアウト等で多くの人が一つのレイアウトを使う場合にはExtended Addressが必要になると思います。次回以降使い方を記載します。
同一メーカのDCCシステム・Decoderを使っている場合、CV#1(Primary Address)以外を変更する必要は殆ど無いと思います。しかしCV値は多くのことを変更できる変数で、CVのことを知ることによりいろいろなことができるようになります。例えば異なる会社の機関車で重連運転する場合、そのままではスロットルに対する反応が異なり、変な動きをすると思います。また、前照灯、尾灯等の灯火の制御も思うように行かないかもしれません。このような場合、適切なCV値を変更することにより意図した動作にすることができます。
ただし、Digitraxの英文Manualには、5.1 What are Configuration Variables (CVs)? に,通常はDefaultで十分なので、CV#1(Primary Address)以外のCV値変更は慎重に行うように、と記載されています。ということで、CV値の変更は自己責任でお願いします。
前述の通り、DCCの規格はNMRAで規定されています。NMRAはNational Model Railroad Association(全米鉄道模型協会)の略称でDCCのみならず、鉄道模型全般の規格を制定しています。過去に私は電気通信の標準化に関係していたことがありますが、NMRAの活動をHPで見る限り、かなりきっちりした手順で標準・規格の制定をしているようです。
DCCについては、NMRAのHPでStandards タブからDCC Sectionから見ることができます。
”NMRA Standards & Conformance Department's Digital Command Control Working Group"のオフィシャルサイトと記載されています。このDCC Sectionでは標準・規格に関する活動状況が掲載されています。
実際の標準・規格はStandardsタブでStandards and Recommended Practicesに現行の標準・規格が全て見られるようになっています。
NMRAは鉄道模型全般の標準・規格を制定していますので、線路や車輪などの規格も掲載されていますが、DCCに関しては、S-9 ELECTRICAL の S-9.2 DCC Communications Standard に掲載されています。S-9.2は2004年に制定されているようです。
DCCのCV値については、2012年に制定されたS-9.2.2 DCC Configuration Variablesに記載されています。
この文書は、12ページで構成されています。
2ページにTable 1 Multi-function Decoder Configuration Variables が掲載されています。この表にはCV#1からCV#1024まで規定されていますが、かなりのCVは "Reserved by NMRA for future use" となっており、現状では使われていないようです。この表には "Required" の欄がありM(Mandatory) (必須項目)、R(Recommended)(推奨項目)、O(Option)(任意項目)に分類されています。Mはわずか4個のCVだけで、Rもわずか4個のCV、Oが362CVになっています(数え間違いがあるかもしれません)。Oの中にはManufacturer Unique, SUSI Sound and Function Moduleが多く含まれていますのでこれらを除くと約100項目以下です。
いずれにせよ、基本的に各Decoderメーカが設定できる項目が多く、各メーカの考え方によりCV値をいろいろな目的で使っていると言えます。
CV値を理解する上で重要なのは、CV値が基本的にビット単位(Binary、2進数)で設定されていることです。一方CV値を書き込む際には多くの場合10進数で書き込む必要があります。2進数といった途端に難しそう、となりそうですが要領さえ覚えれば、簡単に2進数から通常使う10進数(Decimal)に変換でき、10進数の数値をCVに書き込めばすぐ使えます。
ただユーザーを惑わすのは、各社の取扱説明書(manual)でCV値の表現方法がバラバラになっており、中には10進数と16進数が併記されているものもありますので、注意が必要です。
そこで、CV値について、私なりに解説してみたいと思います。
CV値は電子機器で各種設定に用いられるディップスイッチが8個並んでいると考えれば良いと思います。

ディップスイッチの一個一個がビットに相当しており、8ビットとはON/OFFできるディップスイッチが8個あると考えれば良いのです。ただし、デジタルでビットを表現する場合、0ビットから数えますので表現は、Bit 0、Bit 5等と表現します。またディップスイッチの1は通常左から始まりますが、デジタルの表現ではBit 0は右から始まります。
具体的には、Bit 7, Bit 6, Bit 5, Bit 4, Bit 3, Bit 2, Bit 1, Bit 0 と表現されます。また、Bit 7をMSB(Most Significant Bit)、Bit 0をLSB(Least Significant Bit)と記載されることもあります。各Bitは1又は0が格納されています。ディップスイッチでONが1,OFFが0と考えれば良いわけです。十進数に直すのは、数式的には
1×Bit0+2×Bit1+4×Bit2+8×Bit3+16×Bit4+32×Bit5+64×Bit6+128×Bit7
となりますが、各Bitは1か0ですから1になっている(1の時ビットがたっているとも言います)Bitの前の倍数を足せば良いのです。
例えば
二進数の 01001101 は 十進数では
128×0+64×1+32×0+16×0+8×1+4×1+2×0+1×1=77
となりますが、ビットが立っているところだけ足し算をしていることになります。
|
Bit |
Bit7(MSB) |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit0(LSB) |
|
|
Binary |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
|
|
128 |
64 |
32 |
16 |
8 |
4 |
2 |
1 |
|
|
|
Decimal |
|
64 |
|
|
8 |
4 |
|
1 |
77 |
"Value"と言う表記はLokSound5使われています。またDigitraxでは"CV Value"と表記されているようです。
ESUのLokProgrammerを利用すると、Decimal(十進数)とBinary(二進数)のどちらでも入力することができます。Binaryで入力するときは、ビットを立てる(1を入れる)Bit に✔(チェック)をするだけです。上の表と見比べていただくと理解できると思います。

各Bitの使い方にはいくつかの使い方がありますが、基本的には2つの使い方があります。
一つ目は、車両アドレス(CV#1)のように全てのBitで表される十進数に意味があるものです。こちらは間違った数値を入れてもそれほど問題になることはありません。もちろんアドレスや最高速度などが変わります。ただしCVの一部には"0"や"1"に特別な意味がある場合がありますので気をつける必要があります。
もう一つの使い方は、各Bitにそれぞれの意味があるものです。
例えば、比較的変更する場合があるCV29(Configuration Data)では、Bit 0は"Locomotive Direction"で列車の進行方向です。DecoderのMotor配線を間違った場合、前進するはずが後進します。そんな場合配線をやり直さなくてもBit0を"1"にすれば解決出来ます。CV29のBit 1はSpeed Steps and FL Locationです。現在は殆どのDecoderが128 Speed Step対応ですが、DCCの規格上は14Step,28Stepも許容されています。“0” は 14 Speed Step Mode、“1” は28 and 128 Speed Step Modeになります。またBit 4 はQSIのみ"Speed Table set by configuration variables"で“0” はSpeed Table not used、“1” はSpeed Table set by CV 25 で、CV25はQuantum Speed Table selectionになっています。このBitはQuantum機では重要な項目になります。
各Bitにそれぞれの意味合いがある場合、十分注意してCV値を変更しないと全く動かなかったり、意図しない動作をしてしまいます。
ここまで、CVについて一般的な説明をしました。
次回以降、個別のCVについて、動作グループ毎に説明しますが、CV値は原則として10進数で表記します。
扉開閉灯の設置
前回、583系にESU、LokSound5、NGDCCのDF19x4bpの設置について掲載しました。
DF19x4bpのFunctionが2つ余っていたので、扉開閉灯の設置を思い立ち、485系の先頭車両1両に扉開閉灯を設置しました。
TOMIXの583系には赤色のプラスチックを差し込む形で扉開閉灯が表現されています。これを点灯させるため、赤色チップLED(サイズ1005)を赤色プラスチックの裏に設置しました。ピンバイスで1mmΦで0.1mm程の深さに穴を広げLEDを設置します。1mmで貫通すると附属のプラスチック製扉開閉灯がすり抜けてしまいます。

まん中が附属のプラスチック製扉開閉灯、右が設置したチップLED


設置した扉開閉灯の点灯状況
TrainControllerで運転する場合、いくつかの問題があります。
まず、DF19x4bpはFn設定が12までしか使えません。LokSound5では、初期設定で既にF12まで設定されています。このためF11を設定し直し使わないようにします。一方DF19x4bpでも初期設定を変更し、F11で扉開閉灯を制御できるようにします。これらの設定はCV値の変更で設定しています。
次に、LokSound5は車掌の手笛がなり扉が閉じる音が聞こえます。この二つの音は一連で鳴るように設定されています。従って手笛の次に扉開閉灯を消灯すると手笛が鳴っている間に扉開閉灯が消灯してしまいます。このため、手笛が鳴って扉開閉音が鳴るまでの時間を測定し、Timerをその時間で設定し、その後に扉開閉灯が消灯するようにしました。停車する場合も同様ですが、停車の際はCV4(Deceleration)で減速し停止後扉開閉音が鳴るよう連で設定されています。従って停止信号送出時から扉開閉音が鳴るまでの時間を測定し、同様にTimerを設定します。
動画はYouTubeにあげています。チャンネル名は江古田鐵道です。
TOMIX 583系をDCC化
2004年に購入し眠ったままになっていたTOMIX HO-019 583系のDCC化をしました。
これまで自分でDCC化したのはTOMIXの485系やED58等で、DecoderはDigitraxが主で走行系中心でした。サウンドを自分で組み込んだことは有りませんでした。
その後は主に天賞堂のQuantum®搭載機を買ってきました。手軽にDCCを楽しめるのは良いのですが、Decoderの乗っていない車両は前照灯・尾灯が常時点灯するなど不満はありますが、SL、DLはサウンドがあると随分印象が変わります。
今回初めてDesktop Station様からLokSpund 5 micro(Next18)を購入しました。ExpBoard Next18を使うことで比較的容易にDCC化が出来ました。
音源はオープンサウンドデータからMT54・国鉄185系特急電車をD/Lして使っています。
動力性能を実機に近い形になるようにCV値が設定されており、非常にスムーズな加減速がされます。ただし、通常のDCC搭載機と異なり例えば40Km/hからスロットルをゼロにしても、停止するまでには2メートル近くかかります。発進についても同様で、スロットルをゼロから40まであげても車両はゆっくりとスタートし40Km/hに達するのに1.5m位かかります。この為停止している先行車両に近づいてスロットルをゼロにしても追突してしまうことがあります。運転には実機並みのこつが必要です。
TrainControllerで運転する場合には別の問題もあります。所定の位置で停止させようとスロットルをゼロにもどしてもすぐには停止しないことは同じですが、停止後汽笛を鳴らしたり、扉の開閉をする場合、通常であればスロットルをゼロにした後に汽笛や扉開閉を設定すれば問題ありませんが、この583系では停止する前に汽笛や扉開閉が実行されます。この為TrainControllerでは停止後の操作にDelayを設定し、停止までの時間を設定しています。
2M3Tの形で運転を開始しましたが、クハネ583(先頭車両)の前照灯・尾灯が両方点灯するのが気になりだしました。過去に485系の先頭車両に組み込んだLenzのLF100XFが1個有ったので1車両に設置しきちんと点灯するようになりました。もう1両のクハネ583に組み込むためネットで調べてもLF100XFを販売しているのが見つかりませんでした。2004年にクマタ貿易で購入したもので、既にディスコンになっているようです。永末システム事務所がデコーダを作っているのは知っていましたが改めてネットで調べるとDF19x4bpが両極性の機能を持っていることを見つけ購入しました。
小型のFunction Decoderで運転席後部の壁に収まり設置は容易でした。ところが前照灯は点灯しますが尾灯が点灯せず調べたところCV36 FX2設定がF1で点灯するようになっていることが判明。CV値を113から112に設定変更し問題は解決しました。
DF19x4bpは4Functionなので、扉開閉灯をつけてみようと思い立ちました。これが一筋縄ではいかず苦労しました。
次回は扉開閉灯について書きます。
ポイント通過時ショートが発生
レイアウトが一応完成し自動運転も始めたら、ポイント通過時ショートが発生し時々停止が発生。TOMIXの485系はヤードではポイント通過の度に停止するので調査を開始したら、ポイント通過時、M車の通過時ショートが発生しスパークすることもあることを確認。調べたら下図の通過側と分岐側の交差する部分の左側で発生していることを確認。よく見ると交差部分の左右で明らかに左側のギャップが狭いことを確認。写真ではよくわからないが、左側の交差部分に明らかにスパーク痕と見られる変色が確認できた。分岐側に茶色のラッカーを爪楊枝で塗り解消。ラッカーを塗るためレイアウトの上層土台2つを外す。TOMIXの485系、583系は問題ないことを確認したが、天賞堂のC62お召し機は問題解決出来ず。


ショート時の線路間抵抗値(12.1Ω)
C62がショートで停止した時の線路間抵抗値は12.1Ωとなっていました。通常はMΩ台です。485系のショートと異なり、一旦ショートすると車両に触ってもショートのままで明らかに原因が異なると考えられます。またショートは停止位置から見て炭水車にあるように思えました。そこでC62の線路面を見て、他のD51炭水車と明らかに異なっているのがわかりました。

写真から明らかなように炭水車の右側(写真では上)車輪に他の炭水車には見られない部品が着いています。どうもこの部品がポイント通過時にショートを起こしているようです。残念ながら解決法はわかりません。ポイントをある程度の速度で通過させれば一旦ショートしますが即ショート区間を通過し走行できることから特段の対応は取っていません。
今回のショート問題で気がついたことがあります。レイアウトの拡張のため追加で購入した6番ポイントと20年前に購入し使用してきた6番ポイントに微妙な差があることに気がつきました。485系もC62も新しいポイントではショートがほぼ確実に発生しますが、古いポイントでは発生が希なことです。どうも分岐側の線路高が微妙に異なっているような気がします。